Meta's AI-Powered Robot Hand Raises Concerns for Human Workers
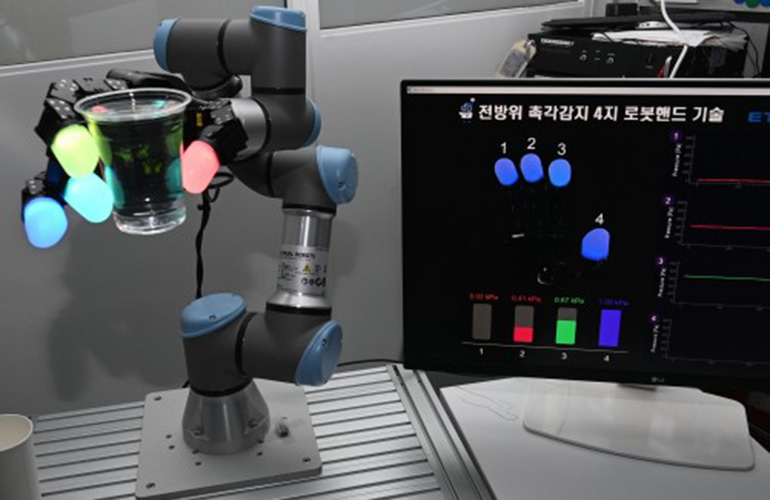
Why it matters: Techcrunch reports that Meta has unveiled a groundbreaking robotic hand that can “feel” touch, marking a significant advancement in robotics that could threaten jobs across multiple industries.
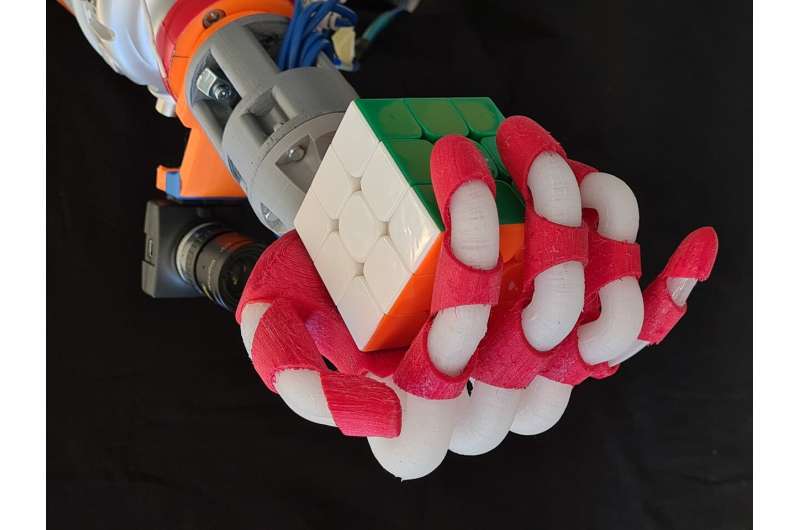
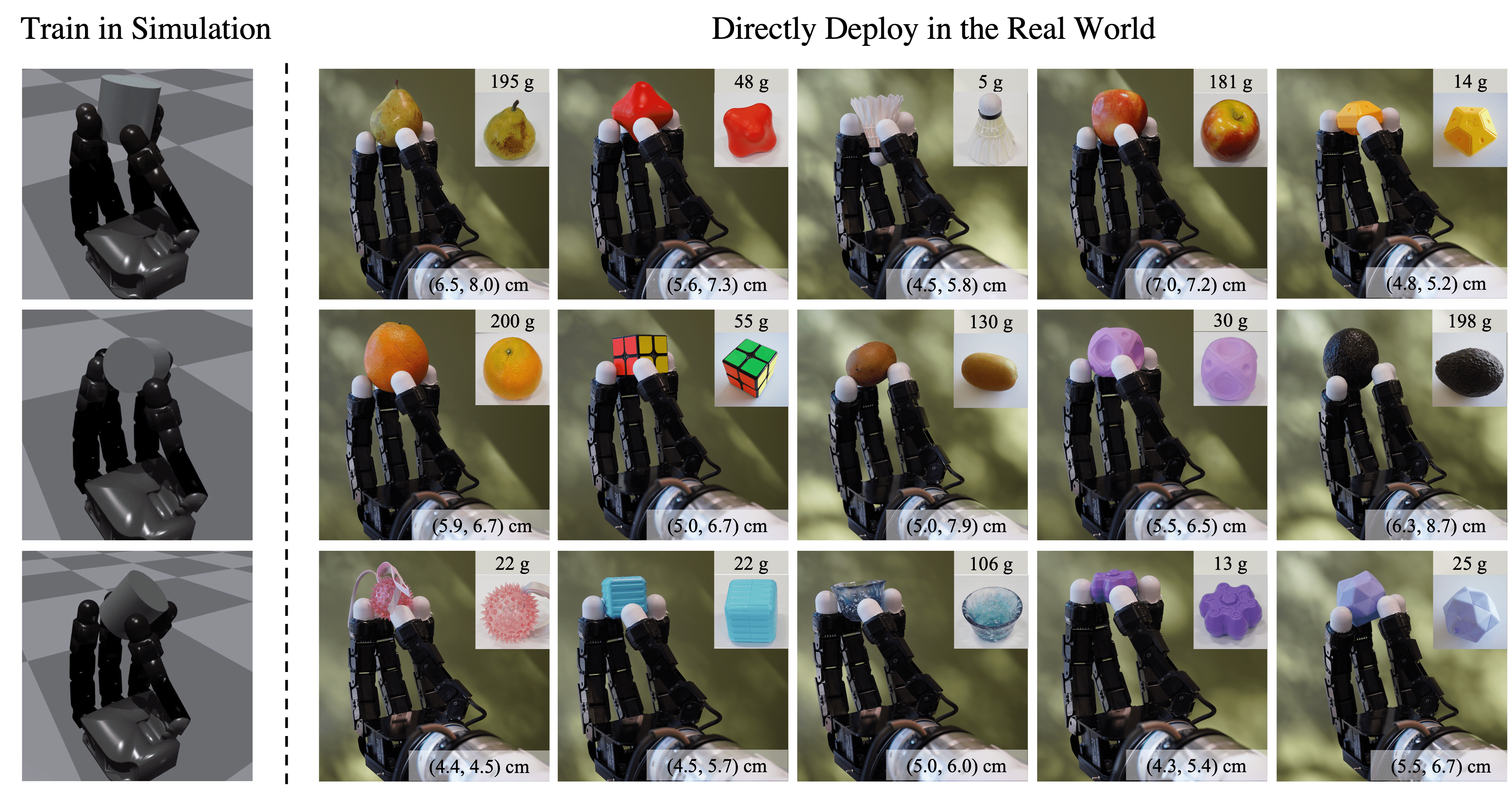
It’s all in the wrist: energy-efficient robot hand learns how not to drop the ball
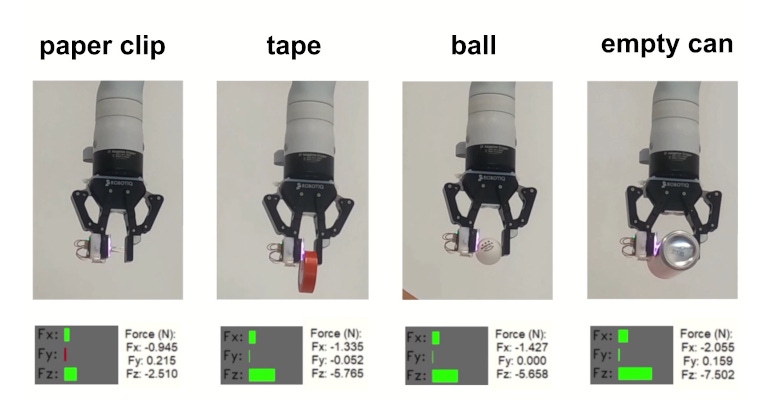
Researchers have designed a low-cost, energy-efficient robotic hand that can grasp a range of objects – and not drop them – using just the movement of its wrist and the feeling in its ‘skin’.